 CALL US: +1 610 458-3000
CALL US: +1 610 458-3000
 CALL US: +1 610 458-3000
CALL US: +1 610 458-3000  News
News











INTRODUCTION
Diving ROVs (Remote Operated Vehicles) deep presents unique operating challenges not faced in many other mission profiles. This eBook equips you to understand the environment and the challenges you might confront, and offers strategies, tactics and tips to help you plan, prepare for, and conduct successful deep dives.
As always, your exact situation and requirements may vary from the premises considered here, so you should consider whether this guidance needs to be adjusted accordingly. If you have questions or concerns, contact VideoRay, we are always happy to discuss your needs.
HOW DEEP IS DEEP?
While there is no definitive value representing a demarcation between shallow versus deep, for the practical purposes of this discussion, we will use “deep” or “at depth” to mean any ROV operations deeper than 150 m (~500 ft). Some factors affecting deep dives such as tether drag induced by water currents may occur in shallow waters as well, such as in rivers with high flows. So, there is bound to be some overlap between deep dives and other operations. Information presented here is therefore transportable to these other operations as applicable.
WHAT IS UNIQUE ABOUT “DEEP”
Some of the characteristics and considerations of deep ROV dives include:
- The depth rating of the equipment may be a concern.
- Current profiles may vary significantly throughout the depth range.
- Natural light attenuation is inevitable below approximately 200 m (~650 ft) and often occurs at much shallower depths. Having any natural light available during deep dives will be extremely rare, even in clear water.
- ROV transit time to and from the operating site may represent a much larger proportion of the total dive time. This extra time requirement should be factored into planning.
- In addition to increased deployment and recovery times, using additional ballast or clump weights and/or anchor lines are likely to be required and will increase the physical effort exerted during these periods. A davit or winch may be necessary.
- While diving or surfacing for extended periods, torque steer from the vertical thruster(s) may cause the ROV to yaw continuously, and auto heading or manual control should be applied to counter the effects and prevent turns from accumulating in the tether. This is especially true for vehicles with a single vertical thruster, like the VideoRay Pro 4 and Pro 5.
- Increased pressures at depth may impact some equipment in ways not experienced in shallow water. For example, neutrally buoyant tethers may compress and become negatively buoyant at depth.
- Depths (or altitudes above) the bottom may exceed the range of some sensors like USBLs (Ultra Short Base Line) or DVLs (Doppler Velocity Log), affecting their ability to ensure ROV location accuracy. Additionally, you are more likely to encounter depth profile changes such as thermoclines (changes in temperature over short distances) or haloclines (changes in salinity) that may affect the performance or accuracy of these sensors.
PLANNING & PRACTICAL GUIDANCE
Deep-dive planning requires all standard ROV dive preparations, plus these additional considerations based on environmental factors:
- Equipment Selection
- Depth Rating
- Tether
- Additional Ballast, Weights, Anchor Lines
- Power Source
- Dive Operations Management
DEPTH RATING
When planning for deep dives, the equipment’s depth ratings must be considered. Most VideoRay ROVs and accessories are depth rated to at least 300 m (~1,000 ft). Mission Specialist modules are depth tested to 2 km (~6,500 ft), however the standard float block is only rated to 400 m (~1,300 ft) and must be exchanged for the deep version when diving deeper. One exception is the VideoRay (Eddyfi/Inuktun) rotating manipulator used on the Defender, as it is rated to 5,000 m (~16,400 ft).
Make sure you select equipment rated for the depth of the dive.
Another depth related issue is the neutral tether, which may compress and lose buoyancy. This may cause the tether to drag on the bottom creating a potential snag hazard. To address this, additional depth tolerant flotation can be attached at intervals along the tether.
TETHER
It is important to note that depending on the water current, you may need use significantly more tether than the vertical depth of the dive to account for the slant range induced by water current. Adding ballast or using an anchor line can reduce the slant range, but a general rule of thumb is to allow at least 25% to 75% additional tether beyond the vertical depth.
Mission Specialist tethers come in copper, copper/fiber hybrid or fiber.
For legacy systems (Pro 4 and earlier), the selection is a choice between the copper tether types: Neutral, PPT (Professional Performance Tether) or Negative. Due to power loss, the larger conductors of Negative or Neutral are preferred, but there is a trade-off. Thicker conductors provide more power, but they also increase the tether diameter, increasing drag and slant angle. If the water current is low, neutral tether may be preferred, but for the highest power delivery it is recommended to use negative tether from the deployment location through the vertical portion of the dive. A short piece of PPT connected between the negative and the ROV will allow the ROV to maneuver easily. A clump weight or anchor line can also be used and help reduce the slant angle if there is some current in the operating area. Using a clump weight will be discussed in more detail in the next section
TETHER MANAGEMENT
Deep dives necessitate long tethers, making tether management critical to success. Usually, a reel is required for long tether lengths. If you don’t have a reel, a simple Figure 8 frame (as shown in this one made from PVC Pipe) is a practical method for storing and deploying long sections of tether.
While it may seem counterintuitive, tether can also be managed effectively loose in a container. As long as the free end is not threaded through the coils it will generally deploy without tangling. A tether bag (made from a pop-up clothes hamper as shown) is another simple method of tether management on deck. Here, fiber tether has been loosely dropped in the bag. It will generally deploy easily without tangles or kinks.


BALLAST & ADDITIONAL WEIGHTS
One of the biggest challenges of deep dives is dealing with current and slant angle due to tether drag. It can become like flying a kite in a storm. At some point, the ROV’s vertical thrust may not be enough to descend any further as the slant angle increases. In order to surmount these situations, there are generally two practices that can be employed either individually or in tandem. These are:
- Use a thinner tether
- Add extra ballast weight
- Switching from copper to fiber tether addresses the first recommendation, but that might create other concerns since the power must be carried onboard the ROV using batteries with limited run-time.
Additional ballast can be added using several methods:
Extra Ballast on the Vehicle
If the extra weight needed is minimal and does not affect the vertical maneuverability of the vehicle significantly, this is the quickest and easiest solution.
If you need more weight to counter the current, one of the following methods can be deployed:
Sacrificial Weights
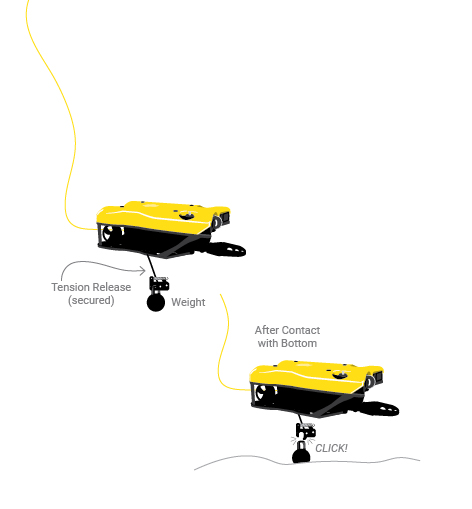
Sacrificial weights are used as extra ballast during the descent, but can be released once the desired depth is achieved. Since they are released at depth, they can be much heavier than carrying extra ballast, and they won’t affect maneuverability once released. These can be as simple as a rock held in the manipulator and released, or using a weight slung under the ROV on cable with a tension release. When the weight contacts the bottom, and the tension release goes slack, it opens, dropping the weight. These work well, and if working near the bottom you might be able to recover the weight for reuse.
Extra ballast and sacrificial weights can speed up the descent times, but remember, the retrieval effort increases, especially if you plan to recover a sacrificial weight. These methods are most applicable when you are able to hold station at your working depth. If you are unable to hold station at depth, you can use extra ballast and a sacrificial weight, but if the extra ballast is not enough to hold station once the sacrificial weight is released, you will need to employ one of the following methods.
Clump Weight on the Tether
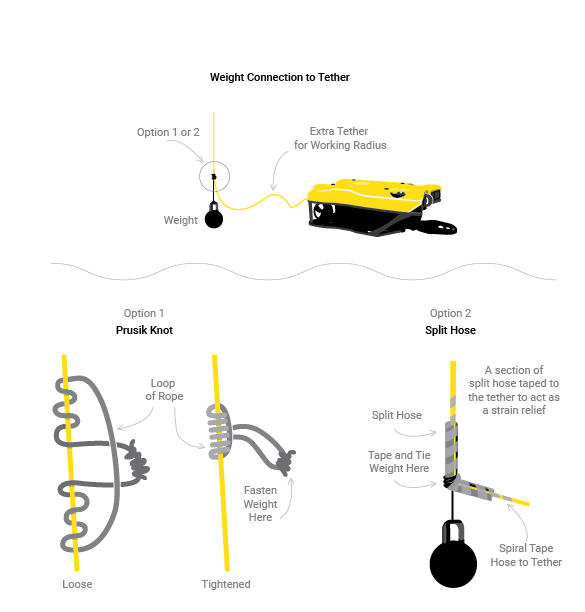
If the extra ballast required is more than the vehicle can support and still maneuver, or if the current keeps pushing the ROV off station, adding a clump weight on the tether may be an effective solution. The clump weight is usually connected to the tether a short distance behind the ROV providing a working radius equal to that distance. VideoRay tether includes Kevlar to support the additional weight. The method used to connect the weight should distribute the weight along a section of the tether rather that concentrated at one point. This can be accomplished by adding a splint or using a Prusik knot. Generally, a clump weight is not recommended for fiber tether.
The Prusik knot can slide along the tether when it is loose allowing you to adjust its location or distance from the ROV. When the weight is applied, the knot will cinch up and hold its location.
Clump weights of up to about 50 kg (or 110 lbs) can be used effectively. Heavier weights should be distributed over longer sections of tether.
Similar to extra weights on the vehicle, clump weights will decrease descent time, but retrieval will require extra effort.
Weighted Anchor Line
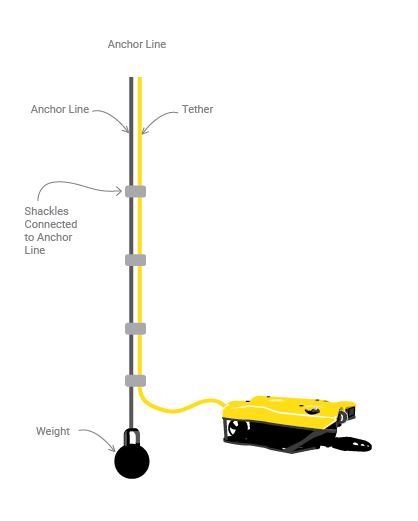
If the extra weight required exceeds the tether strength rating, a weighted anchor line can be used. The tether needs to be shackled to the anchor line at fixed points along its length. Like clump weights, you should include a short section of tether between the ROV and the anchor weight to create a working radius of unrestrained tether. This method can work effectively with the heaviest weight and is usually deployed using a davit.
The weight limitations will depend on the anchor line and the davit capacities. This method is also the most complicated to rig and deploy.
NOTE:
When using a clump weight or anchor line, be careful to coordinate the descent of the ROV and tether deployment rate so that the short length of tether between the ROV and the tether does not float freely. This half hitch knot tied itself during a deep dive. It is also possible to get the ROV looped around the downline tension section of the tether.
To avoid these hazards, it is best to maintain the ROV heading into the current and let the weight drag it down. This will keep tension on the loose section tether and prevent it from wrapping around the downline.

TMS / Garage / Flyout
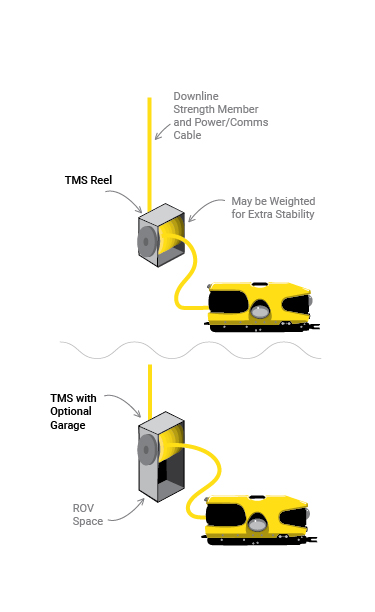
TMSs (Tether Management System), Garages and Flyouts are basically more sophisticated versions of a weighted anchor line. The concept is rather than using a simple weight, these devices have features to better support the ROV and tether management underwater. The TMS is an active tether management reel that is submerged along with the ROV.
It can be weighted so that it acts like a weighted anchor line, but the reel allows local tether management including the ability to rewind the tether to keep the free amount exposed as minimal as possible.
The TMS connection to the surface includes the power and communications circuits in conjunction with the strength member, so the ROV tether does not have to be shackled to the anchor line. Power conversion from higher voltages in the TMS cable can eliminate power losses over using long lengths of ROV tether providing more power closer to the point of use.
A Garage is a TMS with a protected storage location for the ROV. A Flyout uses another larger submersible as the Garage/TMS.
A Flyout ROV can be hosted by a crewed or uncrewed submersible. Perhaps the most notable Flyout ROV is Jason Jr, which was deployed from the DSV Alvin to explore areas of the Titanic that were inaccessible to Alvin and its crew.
DEEP OPERATIONS MANAGEMENT
Management of deep operations requires consideration of various factors typically not encountered during more routine missions. In addition to the above technical aspects of deep missions, other operational practices should be considered.
Power Management Considerations
Fiber tether will require that the vehicle be equipped with on-board batteries. Batteries imply run-time limitations, but in this case, without an easy way to swap out or recharge batteries during the mission. Make sure you are aware of the expected run-time and plan accordingly. You may want to add extra ballast or a sacrificial weight, which will shorten the descent time providing more time for the productive part of the mission.
Position Tracking
Position tracking can be challenging during a deep dive due to the sensor limitations and tracking during the middle depths of the dive may be unavailable. If precise tracking is required, you may need to use higher performing sensors. Using a weighted anchor line/TMS/Garage can assist with keeping the ROV directly below the ship’s position, and a Flyout ROV host may be equipped with its own tracking system and reduce the problem to one of relative position of the Flyout ROV to its host.
To increase the precision of sensors, they should be calibrated in-situ if possible.
Deployment Vessel Placement
If currents in the working area are strong, you can anticipate larger slant angles and should position your deployment vessel up-current to ensure your ROV will arrive in the proximity of the planned operating area.
Backup/Recovery Plan
Do you have a backup or recovery plan if something goes wrong? Most deep dives are beyond diver depths. Think about what could go wrong and how you can respond. This is especially important if the dive includes operating in confined spaces or where tether snags are present.
General Best Practices
Good project planning and management requires a deeper understanding of the parameters that might impact a mission and how these affect planning decisions. While this applies to all missions, there are specific parameters that you should be more keenly aware of during deep dives.
TIMING
On average, it may take about 20-30 minutes to dive to 300 m (or 1,000 ft). This time needs to be taken into account when scheduling a mission. Are there other activities that you can do during this time? You should log descent and ascent times for each dive to create a table or graph that can be used for planning future dives.
BATTERY RUN TIME
Battery run-time is critical since replacing batteries during deep missions may not be practical. Again, keep a log run-time to ensure you can complete your mission before running out of power.
TETHER RECOVERY
Recovering 300 m (or 1,000 ft) or more of tether is physically strenuous, especially when using extra ballast or weights. Is your crew prepared? Do you need mechanical assistance?
DEEP DIVES SUMMARY
Deep dives are one of the most challenging mission profiles to execute and assumptions that they are just like any other dive are ill-conceived. Deep dives require an intimate understanding of the environment, the ROV system’s limitations and a practical understanding and application of the information presented here, increasing your chances of success.
Your comments, feedback and sharing your own deep dive experiences are always welcome for the good of the community.